Chapitre 14 : Mouvement dans un champ uniforme ⚡🍎⚓︎
▶️ Capsule : Le cours complet 1
▶️ Capsule : Le cours complet 2
⚖️ I. Les lois de Newton⚓︎
🧠 A savoir
🎯 1) Le centre de masse d'un système⚓︎
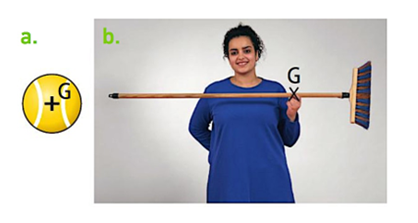
Le centre de masse G d'un système est le point auquel on associe toute la masse du système : si la masse est répartie de façon uniforme, c'est alors le centre géométrique du système. L'étude du mouvement est alors plus simple.
📏 2) Référentiel galiléen et 1ère Loi de Newton⚓︎
Un référentiel galiléen est un référentiel dans lequel le principe d'inertie (ou 1ère loi de Newton) est vérifié.
Rappel du principe d'inertie 🔄
Quand la résultante des forces qui s'applique à un solide est nulle (\(\Sigma\overrightarrow{F} = \overrightarrow{0}\)), alors ce solide est en équilibre (au repos) ou bien en mouvement rectiligne uniforme (et inversement).
Cela implique qu'un référentiel est galiléen s'il est en mouvement rectiligne uniforme par rapport à un autre référentiel galiléen.
🚀 3) Enoncé de la 2ème loi de Newton (OU Principe Fondamental de la Dynamique)⚓︎
L'ensemble des forces qui s'appliquent à un système est équivalent à une force unique appelée résultante des forces ou somme des forces extérieures notée \(\sum\overrightarrow{F_{ext}}\).
Dans un référentiel galiléen (comme le référentiel terrestre), la somme vectorielle des forces qui s'exercent sur un point matériel est égale au produit de sa masse par l'accélération :
Puisque m > 0, le vecteur accélération et le vecteur résultante des forces ont toujours mêmes direction et sens.
La 2ème loi de Newton permet de déterminer les caractéristiques du vecteur accélération, les forces appliquées au système étant connues et inversement.
▶️ Capsule : La deuxième loi de Newton
🧲 II. Champs uniformes⚓︎
🧠 A savoir
Dans ce chapitre, on s'intéresse à 2 champs uniformes (champ uniforme = même sens, même direction et même norme en tout point de l'espace)
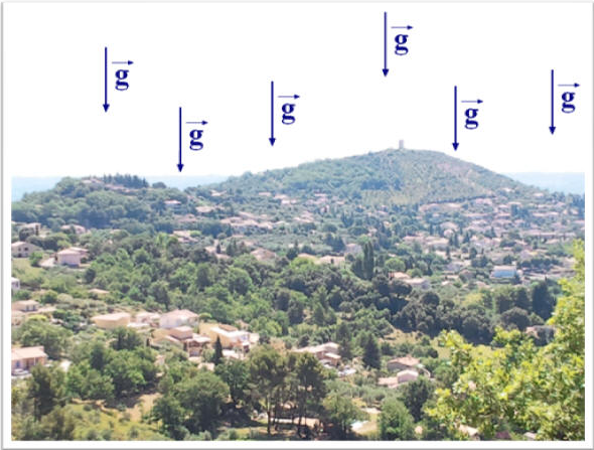
1. Le champ de pesanteur terrestre \(\overrightarrow{g}\) 🌍⚓︎
Il est considéré comme uniforme à la surface de la Terre
\(\overrightarrow{g}\ \left(\begin{array}{l} \text{Direction : la verticale du lieu} \\ \text{Sens : vers le centre de la Terre} \\ \text{Norme : } g = 9{,}81\ \text{N.kg}^{-1} \end{array} \right)\)
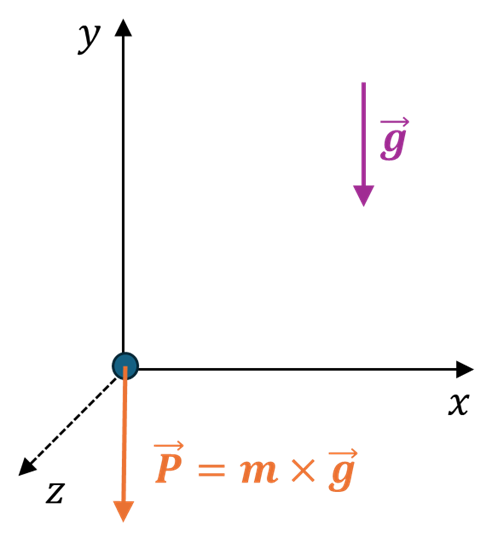
Dans le champ de pesanteur terrestre \(\overrightarrow{g}\), un système de masse m subit une force : \(\overrightarrow{P} = m \times \overrightarrow{g}\)
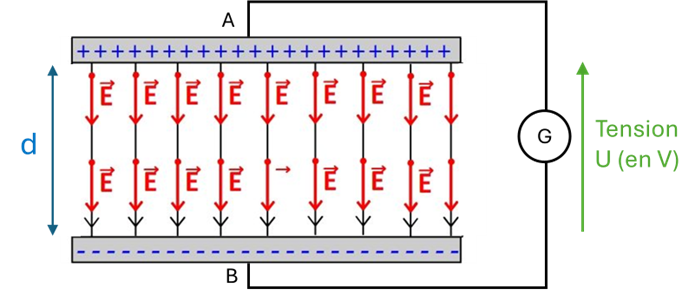
2. Le champ électrique \(\overrightarrow{E}\) ⚡⚓︎
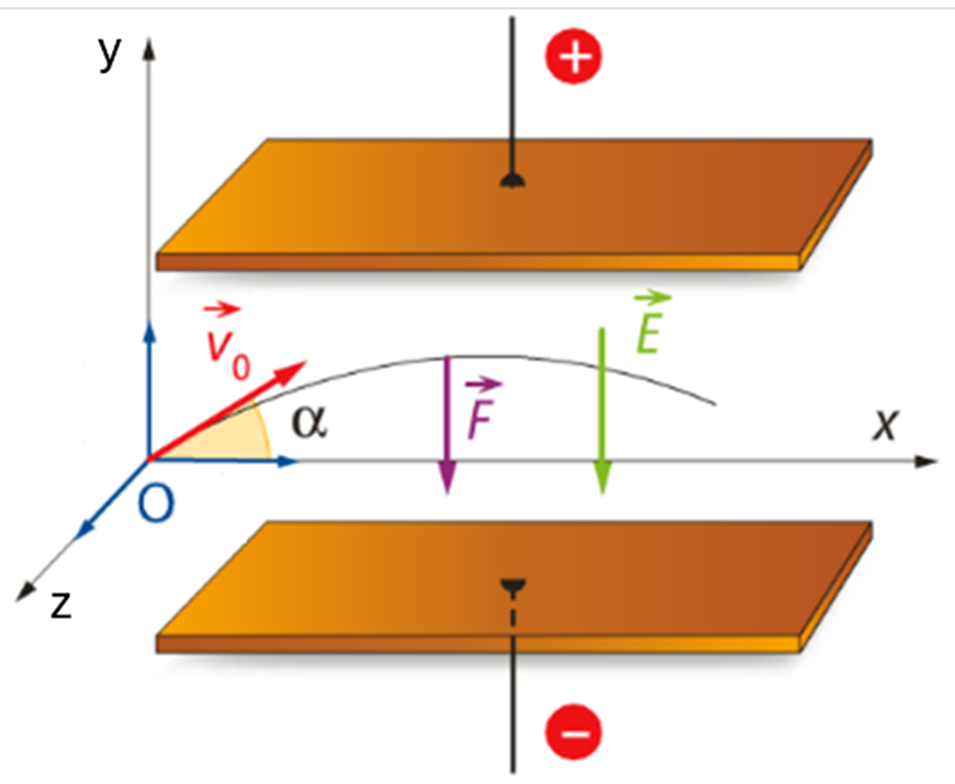
Il est créé entre 2 plaques d'un condensateur plans séparées d'une distance d soumises à une tension U.
\(\overrightarrow{E}\ \left(\begin{array}{l} \text{Direction : perpendiculaire aux plaques} \\ \text{Sens : de la plaque (+) vers la plaque (–)} \\ \text{Norme : } E = \frac{U}{d}\ \text{en V.m}^{-1} \end{array} \right)\)
Dans un champ électrique \(\overrightarrow{E}\), un système de charge q subit une force : \(\overrightarrow{F} = q \times \overrightarrow{E}\)
▶️ Capsule : Force et champ électrique
🍎 III. Mouvement dans un champ de pesanteur uniforme⚓︎
🧠 A savoir
▶️ Capsule : Projeter un vecteur
⬇️ 1) Cas de la chute libre (sans vitesse initiale)⚓︎
On considère le mouvement d'un système de masse m lâché sans vitesse initiale dansle champ de pesanteur \(\overrightarrow{g}=\begin{pmatrix}0\\-g\\0\end{pmatrix}\).
Système⚓︎
Le solide de masse m assimilé à son centre de masse G
Référentiel⚓︎
Le référentiel Terrestre considéré comme Galiléen
Conditions initiales à \(t = 0\)⚓︎
Le système est au point O de repère et la vitesse initiale est nulle donc \(\overrightarrow{OM}_{0}\left(\begin{array}{l} x_{0} = 0 \\ y_{0} = 0 \\ z_{0} = 0 \end{array}\right)\) et \(\overrightarrow{v}_{0}\left(\begin{array}{l} v_{0x} = 0 \\ v_{0y} = 0 \\ v_{0z} = 0 \end{array}\right)\)
Bilan des forces⚓︎
Le système n'est soumis que à son propre poids \(\overrightarrow{P} = m \times \overrightarrow{g}\)
Seconde loi de Newton⚓︎
D'après la deuxième loi de Newton :
\(\Sigma\overrightarrow{F_{ext}} =\overrightarrow{P}= m \times \overrightarrow{a} \Leftrightarrow m \times \overrightarrow{g} = m \times \overrightarrow{a} \quad \text{soit} \quad \overrightarrow{a} = \overrightarrow{g} \Longrightarrow \overrightarrow{a}\left(\begin{array}{l} a_{x}(t) = 0 \\ a_{y}(t) = - g \\ a_{z}(t) = 0 \end{array} \right)\)
On détermine les coordonnées du vecteur vitesse à partir de la définition du vecteur accélération \(\overrightarrow{a} = \frac{d\overrightarrow{v}}{dt}\)⚓︎
\(\overrightarrow{a}\left(\begin{array}{l} a_{x}(t) = 0 \\ a_{y}(t) = - g \\ a_{z}(t) = 0 \end{array} \right) \Longrightarrow \overrightarrow{a}\left(\begin{array}{l} \frac{dv_{x}(t)}{dt} = 0 \\ \frac{dv_{y}(t)}{dt} = - g \\ \frac{dv_{z}(t)}{dt} = 0 \end{array} \right) \xrightarrow{\text{primitive}} \overrightarrow{v}\left(\begin{array}{l} v_{x}(t) = C_{1} \\ v_{y}(t) = - g \times t + C_{2} \\ v_{z}(t) = C_{3} \end{array} \right)\)
⚠️ ATTENTION :
\(C_{1}\), \(C_{2}\) et \(C_{3}\) sont déterminées à partir des conditions initiales.
A \(t_{0} = 0\), on a : \(\overrightarrow{v}(t=0)\left(\begin{array}{l} v_{x}(t=0) = C_{1} \\ v_{y}(t=0) = - g \times 0 + C_{2} = C_{2} \\ v_{z}(t=0) = C_{3} \end{array}\right) = \overrightarrow{v}_{0}\left(\begin{array}{l} v_{0x} = 0 \\ v_{0y} = 0 \\ v_{0z} = 0 \end{array}\right)\)
ce qui implique \(C_{1} = C_{2} = C_{3} = 0\).
On a donc : \(\overrightarrow{v}\left(\begin{array}{l} v_{x}(t) = 0 \\ v_{y}(t) = - g \times t \\ v_{z}(t) = 0 \end{array} \right)\)
On détermine les coordonnées du vecteur position à partir de la définition du vecteur vitesse \(\overrightarrow{v} = \frac{d\overrightarrow{OM}}{dt}\)⚓︎
\(\overrightarrow{v}\left(\begin{array}{l} v_{x}(t) = 0 \\ v_{y}(t) = - g \times t \\ v_{z}(t) = 0 \end{array} \right) \Longrightarrow \overrightarrow{v}\left(\begin{array}{l} \frac{dx(t)}{dt} = 0 \\ \frac{dy(t)}{dt} = - g \times t \\ \frac{dz(t)}{dt} = 0 \end{array} \right) \xrightarrow{\text{primitive}} \overrightarrow{OM}\left(\begin{array}{l} x(t) = C_{4} \\ y(t) = - \frac{1}{2}g \times t^{2} + C_{5} \\ z(t) = C_{6} \end{array} \right)\)
⚠️ ATTENTION :
\(C_{4}\), \(C_{5}\) et \(C_{6}\) sont déterminées à partir des conditions initiales.
A \(t_{0} = 0\), on a : \(\overrightarrow{OM}(t=0)\left(\begin{array}{l} x(t=0) = C_{3} \\ y(t=0) = - \frac{1}{2}g \times 0^{2} + C_{5}=C_{5} \\ z(t=0) = C_{6} \end{array}\right) = \overrightarrow{OM}_{0}\left(\begin{array}{l} x_{0} = 0 \\ y_{0} = 0 \\ z_{0} = 0 \end{array}\right)\)
Ce qui implique \(C_{4} = C_{5} = C_{6} = 0\).
On a donc : \(\overrightarrow{OM}\left(\begin{array}{l} x(t) = 0 \\ y(t) = -\frac{1}{2} \times g \times t^{2} \\ z(t) = 0 \end{array} \right)\)
🏀 2) Cas de la chute parabolique (chute libre avec vitesse initiale)⚓︎
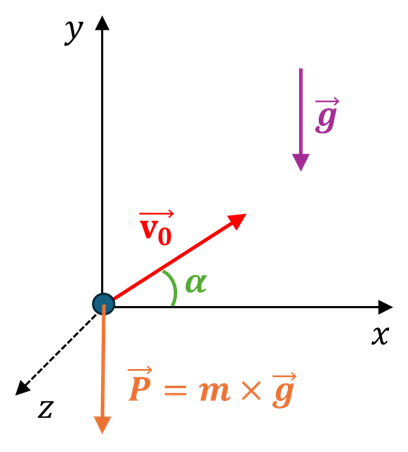
A la date \(t_{0} = 0\), on projette un objet de masse m dans un champ de pesanteur uniforme à partir du point \(O\) origine du repère. Cet objet possède donc au départ du mouvement une vitesse \(\overrightarrow{v_{0}}\) qui fait un angle \(\alpha\) par rapoort à l'horizontale
Système⚓︎
Le solide de masse m assimilé à son centre de masse G
Référentiel⚓︎
Le référentiel Terrestre considéré comme Galiléen
Conditions initiales à \(t = 0\)⚓︎
A \(t_{0} = 0\), c'est-à-dire au départ du mouvement on a les conditions initiales suivantes :
\(\overrightarrow{OM}_{0}\left(\begin{array}{l} x(0) = 0 \\ y(0) = 0 \\ z(0) = 0 \end{array} \right) \quad \text{et} \quad \overrightarrow{v}_{0}\left(\begin{array}{l} v_{x}(0) = v_{0} \times \cos\alpha \\ v_{y}(0) = v_{0} \times \sin\alpha \\ v_{z}(0) = 0 \end{array} \right)\)
Bilan des forces⚓︎
Le système n'est soumis que à son propre poids \(\overrightarrow{P} = m \times \overrightarrow{g}\)
Seconde loi de Newton⚓︎
D'après la deuxième loi de Newton :
\(\Sigma\overrightarrow{F_{ext}} =\overrightarrow{P}= m \times \overrightarrow{a} \Leftrightarrow m \times \overrightarrow{g} = m \times \overrightarrow{a} \quad \text{soit} \quad \overrightarrow{a} = \overrightarrow{g} \Longrightarrow \overrightarrow{a}\left(\begin{array}{l} a_{x}(t) = 0 \\ a_{y}(t) = - g \\ a_{z}(t) = 0 \end{array} \right)\)
On détermine les coordonnées du vecteur vitesse à partir de la définition du vecteur accélération \(\overrightarrow{a} = \frac{d\overrightarrow{v}}{dt}\)⚓︎
\(\overrightarrow{a}\left(\begin{array}{l} a_{x}(t) = 0 \\ a_{y}(t) = - g \\ a_{z}(t) = 0 \end{array} \right) \xrightarrow{\text{primitive}} \overrightarrow{v}\left(\begin{array}{l} v_{x}(t) = C_{1} \\ v_{y}(t) = - g \times t + C_{2} \\ v_{z}(t) = C_{3} \end{array} \right)\)
⚠️ ATTENTION :
\(C_{1}\), \(C_{2}\) et \(C_{3}\) sont déterminées à partir des conditions initiales.
A \(t_{0} = 0\), on a : \(\overrightarrow{v}(t=0)\left(\begin{array}{l} v_{x}(t=0) = C_{1} \\ v_{y}(t=0) = - g \times 0 + C_{2} = C_{2} \\ v_{z}(t=0) = C_{3} \end{array}\right) = \overrightarrow{v}_{0}\left(\begin{array}{l} v_{0x} = v_{0} \times \cos\alpha \\ v_{0y} = v_{0} \times \sin\alpha\\ v_{0z} = 0 \end{array}\right)\)
ce qui implique :
- \(C_{1} = v_{0} \times \cos\alpha\)
- \(C_{2} = v_{0} \times \sin\alpha\)
- \(C_{3} = 0\).
On a donc : \(\overrightarrow{v}\left(\begin{array}{l} v_{x}(t) = v_{0} \times \cos\alpha \\ v_{y}(t) = - g \times t + v_{0} \times \sin\alpha \\ v_{z}(t) = 0 \end{array} \right)\)
On détermine les coordonnées du vecteur position à partir de la définition du vecteur vitesse \(\overrightarrow{v} = \frac{d\overrightarrow{OM}}{dt}\)⚓︎
\(\overrightarrow{v}\left(\begin{array}{l} v_{x}(t) = v_{0} \times \cos\alpha \\ v_{y}(t) = - g \times t + v_{0} \times \sin\alpha \\ v_{z}(t) = 0 \end{array} \right) \xrightarrow{\text{primitive}} \overrightarrow{OM}\left(\begin{array}{l} x(t) = v_{0} \times \cos\alpha \times t + C_{4} \\ y(t) = - \frac{1}{2}g \times t^{2} + v_{0} \times \sin\alpha \times t + C_{5} \\ z(t) = C_{6} \end{array} \right)\)
⚠️ ATTENTION :
\(C_{4}\), \(C_{5}\) et \(C_{6}\) sont déterminées à partir des conditions initiales:
A \(t_{0} = 0\), on a : \(\overrightarrow{OM(t=0)}\left(\begin{array}{l} x(0) = v_{0} \times \cos\alpha \times 0 + C_{4} = C_{4} \\ y(0) = - \frac{1}{2}g \times 0^{2} + v_{0} \times \sin\alpha \times 0 + C_{5} = C_{5} \\ z(t) = C_{6} \end{array} \right) = \overrightarrow{OM}_{0}\left(\begin{array}{l} x(0) = 0 \\ y(0) = 0 \\ z(0) = 0 \end{array} \right)\)
Ce qui implique : \(C_{4} = C_{5} = C_{6} = 0\).
On a donc : \(\overrightarrow{OM}\left(\begin{array}{l} x(t) = v_{0} \times \cos\alpha \times t \\ y(t) = -\frac{1}{2}g \times t^{2} + v_{0} \times \sin\alpha \times t \\ z(t) = 0 \end{array}\right)\)
📐 3) Équation de la trajectoire⚓︎
Équation de la trajectoire : relation mathématique entre les coordonnées spatiales : il faut « éliminer » la variable temps des équations pour avoir y = f(x)
On isole \(t\) dans l'expression de \(x(t)\) :
\(x(t) = x = v_{0} \times \cos\alpha \times t \Longrightarrow t = \frac{x}{v_{0} \times \cos\alpha}\)
On remplace \(t\) dans l'expression de \(y(t)\):
\(y(t) = y = - \frac{1}{2}g \times t^{2} + v_{0} \times \sin\alpha \times t\) → En substituant \(t\), on obtient :
\(y = - \frac{1}{2}g \times \left( \frac{x}{v_{0} \times \cos\alpha} \right)^{2} + v_{0} \times \sin\alpha \times \left( \frac{x}{v_{0} \times \cos\alpha} \right)\)
\(y = - \frac{g}{2v_{0}^{2} \times \cos^{2}\alpha} \times x^{2} + \frac{v_{0} \times \sin\alpha}{v_{0} \times \cos\alpha} \times x\)
\(y = - \frac{g}{2v_{0}^{2} \times \cos^{2}\alpha} \times x^{2} + \tan\alpha\times x\)
✅ 4) Conclusion⚓︎
-
\(z(t) = 0\) : le mouvement se fait uniquement dans le plan \((O,x,y)\).
-
\(y = ax^{2} + bx\) , la trajectoire du mouvement est donc parabolique. 🎯
-
On peut calculer la portée du projectile en résolvant l'équation \(y = 0\).
-
Ceci revient à résoudre l'équation du second degré \(ax^{2} + bx = 0\) avec \(\left(\begin{array}{l} a = - \frac{g}{2v_{0}^{2} \times \cos^{2}\alpha} \\ b = \tan\alpha \end{array} \right)\)
-
On peut calculer l'altitude maximale atteinte. Ceci correspond au moment où la composante \(v_{y}(t)\) de la vitesse s'annule (le vecteur vitesse au sommet S de la parabole est horizontal) 📏
\(v_{y}(t_{S}) = - g \times t_{S} + v_{0} \times \sin\alpha = 0\) ce qui donne \(t_{S} = \frac{v_{0} \times \sin\alpha}{g}\)
Il suffit ensuite de remplacer \(t_{S}\) dans les équations des coordonnées x et y pour connaître les coordonnées du point S et donc l'altitude maximale.
▶️ Capsule : Mouvement dans le champ de pesanteur démonstration complète
▶️ Capsule : Mouvement dans le champ de pesanteur Exercice de Bac
⚡ IV. Mouvement d'une particule dans un champ électrique⚓︎
🧠 A savoir
On étudie une particule ponctuelle de charge q et de masse m, qui pénètre à l'instant t = 0 avec une vitesse \(\overrightarrow{v}_{0}\) dans un champ électrostatique uniforme \(\overrightarrow{E}\). Le poids de la particule est négligeable.
Système
La particule ponctuelle de charge q et de masse m
Référentiel :
Le référentiel Terrestre supposé Galiléen
Conditions initiales
A \(t_{0} = 0\), c'est-à-dire au départ du mouvement on a les conditions initiales suivantes :
\(\overrightarrow{OM}_{0}\left(\begin{array}{l} x(0) = 0 \\ y(0) = 0 \\ z(0) = 0 \end{array} \right) \quad \text{et} \quad \overrightarrow{v}_{0}\left(\begin{array}{l} v_{x}(0) = v_{0} \times \cos\alpha \\ v_{y}(0) = v_{0} \times \sin\alpha \\ v_{z}(0) = 0 \end{array} \right)\)
Bilan des forces :
La particule n'est soumise qu'à la force électrique \(\overrightarrow{F}\), son poids étant négligeable.
\(\overrightarrow{F} = q \times \overrightarrow{E}\) avec \(\overrightarrow{E}\begin{pmatrix} 0 \\ -E \\ 0 \end{pmatrix}\)
Deuxième loi de Newton
La deuxième loi de Newton permet d'écrire :
\(\Sigma\overrightarrow{F_{ext}} = m \times \overrightarrow{a} \Longrightarrow q \times \overrightarrow{E} = m \times \overrightarrow{a} \Longrightarrow \overrightarrow{a} = \frac{q}{m} \times \overrightarrow{E} \Rightarrow \overrightarrow{a}\begin{pmatrix} 0 \\ -\frac{q}{m}E \\ 0 \end{pmatrix}\)
Équations horaires du mouvement 📋 :
La méthode des primitives successives nous permet de trouver les équations horaires
\(\overrightarrow{a}\left(\begin{array}{l} a_{x}(t) = 0 \\ a_{y}(t) = - \frac{q \times E}{m} \\ a_{z}(t) = 0 \end{array} \right) \Rightarrow \overrightarrow{v}\left(\begin{array}{l} v_{x}(t) = v_{0} \times \cos\alpha \\ v_{y}(t) = - \frac{q \times E}{m}t + v_{0} \times \sin\alpha \\ v_{z}(t) = 0 \end{array} \right) \Rightarrow \overrightarrow{OG}\left(\begin{array}{l} x(t) = v_{0} \times \cos\alpha \times t \\ y(t) = - \frac{1}{2}\frac{q \times E}{m}t^{2} + v_{0} \times \sin\alpha \times t \\ z(t) = 0 \end{array} \right)\)
Équation de la trajectoire 📐 :
\(t = \frac{x}{v_{0} \times \cos\alpha} \Longrightarrow y(x) = - \frac{q \times E}{2 \times m \times v_{0}^{2} \times \cos^{2}\alpha}x^{2} + \tan\alpha \times x\)
💡 On retrouve une équation de la forme \(y = ax^{2} + bx\) : la trajectoire est également parabolique, de manière analogue au mouvement dans un champ de pesanteur.
▶️ Capsule : Mouvrment dans un champ électrique démonstration complète
▶️ Capsule : Mouvement dans un champ électrique Exercice de Bac